1 概述
本公司研发生产的BLD2410驱动器是一款高性能,多功能,低成本的带霍尔传感器直流无刷驱动器。全数字式设计使其拥有灵活多样的输入控制方式,极高的调速比,低噪声,完善的软硬件保护功能,驱动器可通过串口通信接口与计算机相连,实现PID参数调整,保护参数,电机参数,加减速时间 等参数的设置,还可进行IO输入状态,模拟量输入,报警状态及母线电压的监视。
● 速度PID 闭环控制,低速转矩大
● 调速范围:0-30000RPM,最高转速可限制
● 运行加减速时间可由软件设定,实现平滑柔和运行
● 驱动器自身损耗小,效率高,温升低,因此体积小,易安装
● 多种速度控制方式,由软件设定
● 多种完善的保护功能
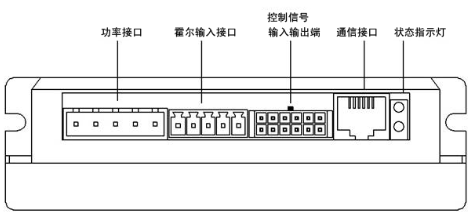
◆功能描述 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
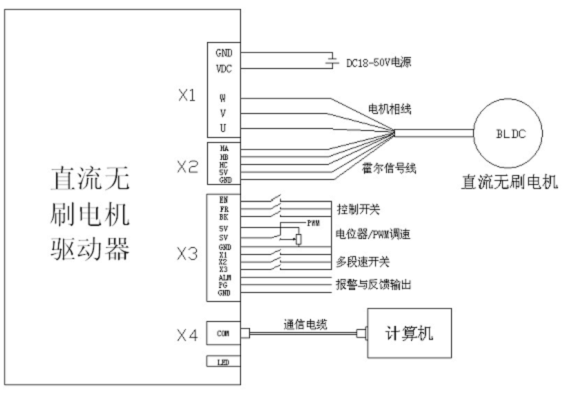
SV 模拟量/PWM输入端子:SV用于模拟量输入或者PWM输入端,当在BLDC_2软件的输入设置为“模拟输入”或者“PWM输入”方式时,该端口输入的量作为速度的给定值。
FR 正反转方向控制端子:FR 端子用于控制电机转动方向。FR端子不同电平切换时会根据加减速时间设定值,先减速到0,然后切换方向再从0速加度到给定值。如果电机拖动的负载惯量大,应适当加大加减速时间,否在方向切换时有过流或者电压过高的情况。
ENA 电机使能端子:ENA脚与GND的接通与断开可控制电机的运行与停止,只有在ENA脚与GND连接时其它的操作才能被允许,若断开则电机处于自由状态,其它的操作被禁能。当电机出现故障时,可以先断开ENA引脚,然后再接通来清除故障。
BK 刹车控制端子:当BK脚与GND脚的断开时, 驱动器将三根相线短路,电机处于制动状态。当BK脚与GND脚的接通时,电机脱离制动状态。如果电机处于高速或者负载惯量比较大时,刹车对电气和机械装置产生冲击,损害大。除安全紧急制动外,应避免此类制动行为。为了减小动作时间,尽量把速度减少到比较安全范围再进行刹车。
X1,X2,X3多段速控制端子:在配置软件中可设置多段速输入模式多段速模式有两种,分别为模式1及模式2,模式1为译码方式,模式2为位选方式。
多段速1:X1,X2,X3与GND的断开或闭合可以组合成8种不同的设置对应8段不同的速度,来实现不同的转速,不同转速过渡按设定的加减速时间进行。
|
多段速2:多段速2为位选模式,即X1,X2,X3各对应一个速度。X1闭合时,运行速度段0设定的转速;X2闭合时,运行速度段1设定的转速;X3闭合时,运行速度段2设定的转速;X1,X2,X3有两个或全部闭合时,优先级由高到低排列为X1>X2>X3,如X1,X2同时闭合,则运行速度段0。X2,X3同时闭合时,则运行速度段1。当X1,X2,X3都断开时,运行速度段3设定的转速。切换后不同转速过渡按设定的加减速时间进行。
|
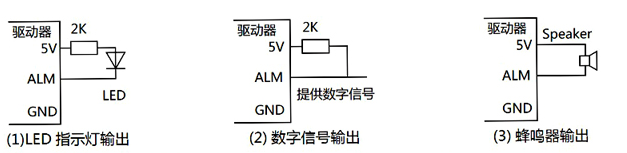
ALM报警输出端子:ALM信号输出是三极管开漏输出。当驱动器发生,短路,过流,霍尔信号错误,过电压,欠压等异常时,在ALM输出低电平。其吸收电流应小于50mA ,报警输出电路有如下几种:
PG霍尔信号输出端子:PG信号用于提供电机转速脉冲信号,PG信号为开漏输出,测试时应在5V与PG之间加一个2K-10K电阻作上拉电阻。
电机一个电周期内将在PG信号端输出3个脉冲。
机械周期=电周期*极对数
对于两对极的电机旋转一周将产生6个脉冲,四对极则为12个脉冲。
电机转动时在PG端输出的频率与转速关系如下式
电机转速(RPM)=20×PG信号频率 / 电机极对数
PWR/ALM 指示灯:驱动器上有两个LED指示灯,分别为红色及绿色,红色为ALM错误类型指示灯,绿色为电源指示灯。上电后正常情况为绿灯常亮,如绿灯灭请确认电源是否正常。
◆典型接线图